
Creating biohybrid robots—machines powered by lab-grown muscle tissue—has long been a goal for scientists aiming to build more adaptable, flexible robots. These robots could potentially squeeze and twist through spaces that are too small or complex for traditional machines. However, a significant challenge has stood in the way: existing artificial muscles typically only contract in one direction, limiting their range of motion. Imagine a robot with an arm that can only flex but can never rotate—this limitation has been a key obstacle.
Now, researchers at MIT have cracked the code for creating a new type of artificial muscle capable of complex, multi-directional movement. In a groundbreaking development, they’ve created artificial muscle fibers that can move in multiple directions, mimicking the behavior of the iris in a human eye. To prove their concept, the team designed a muscle-powered structure that contracts both in a circular and outward direction, showcasing a level of motion that previous biohybrid robots couldn’t achieve.
At the heart of this breakthrough is a new technique called “stamping,” which the researchers used to create an iris-like structure capable of multi-directional motion. The process begins with 3D printing a tiny stamp patterned with microscopic grooves. This stamp is then pressed into a soft hydrogel to create a template for muscle growth. Once the grooves are in place, real muscle cells are seeded into the pattern, where they begin to grow into muscle fibers. Upon stimulation, the fibers contract, moving in various directions based on the pattern of the grooves.
“With the iris design, we believe we have demonstrated the first skeletal muscle-powered robot that generates force in more than one direction. That was uniquely enabled by this stamp approach,” said Ritu Raman, the Eugene Bell Career Development Professor of Tissue Engineering in MIT’s Department of Mechanical Engineering.
Raman’s lab has been working on cultivating and training lab-grown muscle cells for some time, but achieving multi-directional movement has remained a significant challenge. She explains that natural muscle tissues, like those in the iris and around the trachea, don’t just point in one direction—they have multiple orientations, which allows for more complex movement. However, replicating this characteristic in engineered muscles has been elusive—until now.
To create the multi-directional muscle fibers, the MIT team 3D-printed a small stamp with extremely fine grooves, sized to match individual muscle cells. To ensure a clean imprint and avoid damaging the delicate hydrogel, the researchers coated the stamp with a protein layer before pressing it into the gel. This protein layer helped transfer the pattern smoothly, allowing the stamp to be removed without sticking or tearing the material.
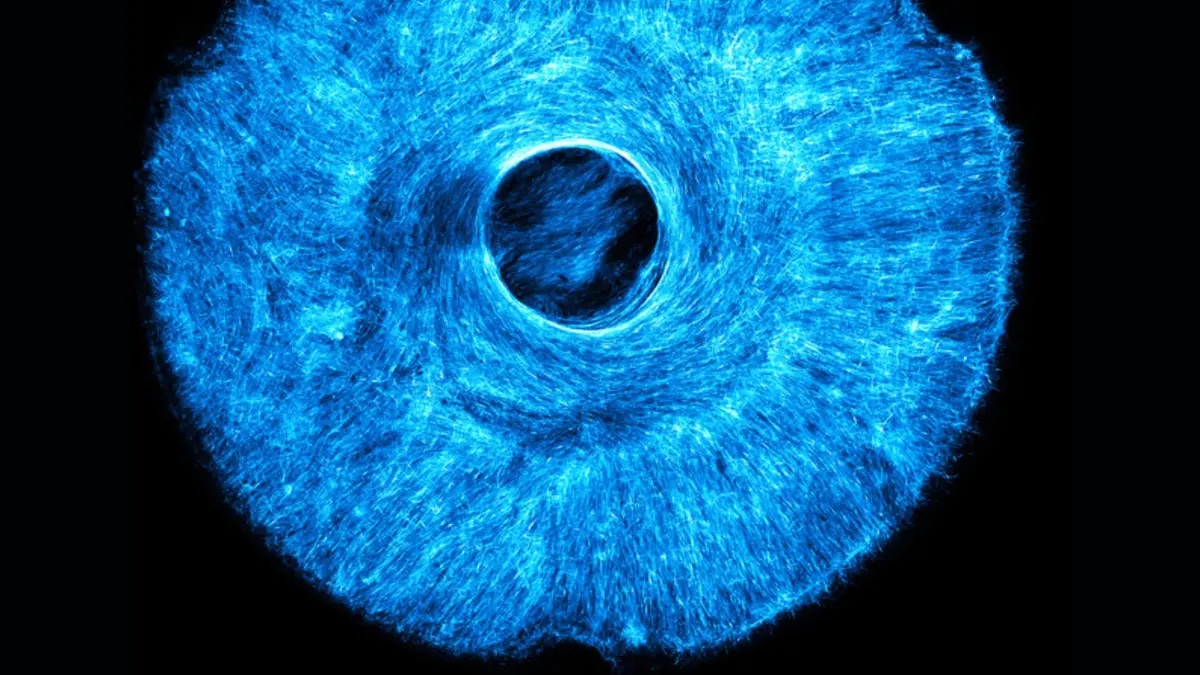
For their demonstration, the team chose to recreate the muscle structure of the human iris, which features both circular and radial muscle fibers. These muscles allow the iris to dilate and constrict in response to light. After imprinting the iris pattern onto the hydrogel, the researchers introduced genetically modified muscle cells that respond to light. Within 24 hours, these cells settled into the grooves and fused to form muscle fibers that followed the precise iris-like pattern.
When stimulated with light, the artificial iris contracted in multiple directions, mimicking the complex movement of a real iris. This successful demonstration highlighted the team’s ability to create muscle tissue that can produce intricate, multi-directional motion.
The potential applications of this new technique are vast. By using their stamping method, the researchers have created a muscle-powered structure capable of performing tasks that previous biohybrid robots simply couldn’t do. While the team focused on skeletal muscle cells for this work, Raman points out that there’s nothing stopping researchers from using this technique with other types of cells in the future.
“In this work, we wanted to show we can use this stamp approach to make a ‘robot’ that can do things that previous muscle-powered robots can’t do. We chose to work with skeletal muscle cells, but there’s nothing stopping you from doing this with any other cell type,” Raman said.
As researchers continue to explore the potential of biohybrid robots, this discovery marks a significant step forward. With the ability to create complex, multi-directional muscle tissue, the future of robots powered by lab-grown muscles looks more promising than ever.
By Impact Lab
