

By TIM MCMILLAN·
The challenge to imitate nature’s gravity-defying designs has confounded some of the most brilliant engineering minds for at least the last 1,200 years. Specifically, designing a functional ornithopter–the technical term for an aircraft that flies by flapping its wings–has proven to be an exceptionally difficult task.
Now, thanks to a recent breakthrough, the development of the world’s first true ornithopter and dexterous-winged unmanned aircraft, capable of flying and perching just like a bird, appears to be on the horizon.
Researchers working with the European Union-funded GRIFFIN project recently demonstrated the ability of an ornithopter to fly, land, and perch on a tree branch using a talon-like claw system. All autonomously, without any additional in-flight input from a remote user. The achievement marks the first time a large-scale autonomous ornithopter has been able to perform this incredibly complicated maneuver.
According to the GRIFFIN project, this recent breakthrough will pave the way for flapping-wing robots to perform a number of real-world applications, including long-range observation and logistics missions.
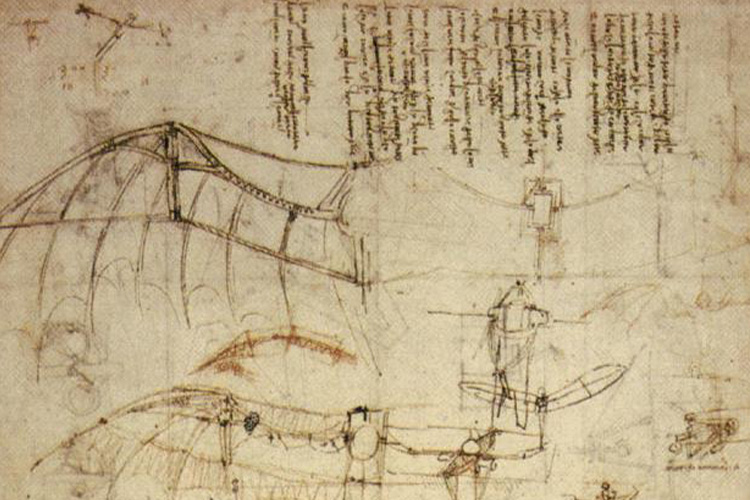
Sketches of an early ornithopter design by Leonardo Da Vinci in 1488. (Image Source: Wikicommons)
ATTEMPTING BIRD-LIKE FLIGHT IS NOTHING NEW
For at least a thousand years, humans have been trying to take to the air by mimicking the flight of birds.
One of the oldest recorded attempts at winged flight was purportedly performed by 9th-century scholar and inventor of the magnifying glass, Abbas ibn Firnas.
According to Algerian historian Ahmed Mohammed al-Maqqari, Firnas “covered himself with feathers…attached a couple of wings to his body” and, based on the testimony of several “trustworthy witnesses,” “flew a considerable distance, as if he was a bird.”
Considering it came to light 700 years after Firnas’ death, Mohammed al-Maqqari’s account is somewhat dubious. However, given humanity’s predisposition towards innovation, it is safe to assume there have countless attempts to imitate avian flight for thousands, if not tens of thousands, of years.
In 1485, while studying the flight of birds, Leonardo da Vinci realized that humans were too heavy and not strong enough to fly using wings attached to the arms. Instead, da Vinci sketched out a device that used hand levers, pulleys, and foot pedals to flap a large set of wings in what is arguably the first recorded example of an ornithopter design.
By the late 19th and early 20th century, several aerospace engineers unsuccessfully tried to develop crewed flapping-wing aircraft using various means such as rubber bands, springs, steam, or compressed air.
In 2010, the University of Toronto Institute for Aerospace Studies’ human-powered and tow-launched ornithopter, the “Snowbird,” showed off its ability to successfully stay aloft for almost 20 seconds and travel a distance of 476 feet.
Not exactly the kind of numbers to threaten putting the Boeing 737 or Sikorsky Blackhawk out of a job. However, the “Snowbird” presently holds the world record for a crewed ornithopter.

WE HAVE STEALTH BOMBERS AND PREDATOR DRONES. WHY EVEN BOTHER WITH BIRD-LIKE FLIGHT?
With flapping wing designs experiencing a thousand-year track record of failure, it leaves a significant and pressing question: Why keep trying to develop bird-like aircraft? Especially when you consider there has been over a century of success with fixed or rotary-wing aircraft.
The most obvious answer for continuing to try and crack the bird-flight riddle is to compare nature’s powered flight vs. current aircraft capabilities.
Imagine a Lockheed Martin F-35 Lightning II fighter jet trying to keep up with a golden eagle as it goes from flying along at a horizontal speed of 80 mph to suddenly launching into a 200 mph high-speed dive just before sharply stretching out its wings in an upward glide and gracefully performing a vertical landing on a tree branch.
“Watching them is fascinatingly alien,” Lydia France, a data scientist at the Alan Turing Institute and a postdoctoral researcher at the University of Oxford, commented when describing the flight mechanics of raptors. “The ability of hawks to land by nearly stopping in midair is unmatched by their mechanical counterparts.”
The simple fact is that the maneuverability of even the most advanced aircraft cannot compare to the aerobatic prowess of birds, bats, or insects.
Aside from super-maneuverability, there are also several other areas where ornithopters could be superior to their fixed or rotary-winged counterparts.
With dynamically responsive wings, a bird-like drone could react to wind currents, transitioning from flapping to gliding to conserve energy and extending flight time and range.
Additionally, the lack of spinning rotors means that ornithopters could safely come into direct contact with humans.
An ornithopter’s safety would be highly-beneficial in emergencies, where a bird-like drone could arrive at a remote location before medical personnel and check vitals with minimal interference to injured persons.
Of course, in an ironic twist on the “Birds Aren’t Real” parody, one can also envision intelligence agencies and militaries languishing at the prospect of having a real covert spy drone that could be easily overlooked as being a common bird.
“The immediate benefits are increased safety as there are no fast-moving blades and reduction in noise, again for the same reason,” Dr. Raphael Zufferey, a postdoctoral fellow at the University of Seville and lead author of the recent study, told The Debrief. “Flapping-wing robots can therefore be operated close to humans, animals, and structures.”

BUT BIRDS MAKE IT LOOK SO EASY
The incredible aerial abilities of birds stem from millions of years of evolution.
Physical adaptations, such as lightweight solid bones, feathers for catching air, and a highly-efficient respiratory system, come together to form a biological flight system that far exceeds anything we have been able to engineer artificially.
And while having an unrivaled physical design is the most critical feature, the biomechanics behind a bird’s super maneuverability has largely remained a mystery.
In an airplane, thrust is achieved by either a jet or propeller engine. Meanwhile, lift is generated by the curved shape of the fixed wings, or airfoil, which causes the air pressure below the wings to be higher, allowing the aircraft to take flight. These same principles apply to helicopters, with rapidly spinning rotor blades providing lift and slightly tilting the angle of the blades generating thrust.
Birds, on the other hand, achieve powered flight by generating both lift and thrust by moving their wings relative to their body.
Because achieving flight by flapping wings involves constant changes in speed, angles, orientations, and airflow patterns, fully understanding these aerodynamic flight characteristics of winged flight has proven to be challenging.
Ultimately, after tens of thousands of years of meticulous bird watching, there are still significant gaps in our knowledge of how birds fly.
That said, recent breakthroughs in understanding bird flight, coupled with advancements in synthetic biomaterials, unmanned aerial vehicles (UAV), and Artificial Intelligence (AI), has created a situation where the realization of an ornithopter aircraft capable of bird-like flight is closer than ever.

SOLVING A MAJOR OBSTACLE IN BIRD-LIKE DRONE FLIGHT
Initiated in 2020 through an Advanced Grant from the European Research Council of the European Union, the collective of engineers from the University of Seville working on the GRIFFIN project has been steadily harnessing technological advances to develop the world’s first operational bird-like unmanned aerial vehicle.
Christened from a loose acronym of its more prolonged and verbose full name – “General compliant aerial Robotic manipulation system Integrating Fixed and Flapping wings to INcrease range and safety”- GRIFFIN is not necessarily the only program currently trying to build an ornithopter UAV.
Animal Dynamics has been working to develop a flapping-wing micro drone called “Skeeter” since 2015. The British aerospace company envisions Skeeter as a mechanical analog of a dragonfly, “ideally suitable for short-range surveillance, search and rescue, and surveying missions.”
Unique to others in ornithopter development, the GRIFFIN project doesn’t just want to build just a flapping-wing aircraft. Instead, they aim to create a flying robot with “dexterous manipulation capabilities,” capable of carrying out tasks with its artificial limbs, including landing and perching on curved surfaces.
Given that topics like hypersonic flight or stealth usually dominate discussions on future aviation technologies, it’s easy to overlook the significance of being able to land smoothly on a narrow tree branch. However, in recent years, several landmark studies have revealed that perching at speed is one of the most demanding flight behaviors birds perform.
In a study published last year in Nature, researchers found that birds constantly alter the aerodynamic characteristics of their wings and bodies to allow them to transition back and forth from smooth-stable to unstable acrobatic flight.
Meticulously monitoring the biomechanics of 1,576 flights of Harris’ hawks, researchers found that taking the fastest or most energy-efficient route from perch to perch was an afterthought. Instead, the hawks consistently transitioned the aerodynamic character of their wings and flight paths to what allowed them to land safely and perch with the most control.
Needless to say, getting an autonomous drone to perform a demanding biological behavior that has been honed by hundreds of millions of years of evolution isn’t exactly a walk in the park.
“It is a difficult maneuver to achieve as the system required to hold the robot’s weight on the branch needs to be integrated within a forward flying vehicle that needs to land at a precise location autonomously,” explained Dr. Zufferey.
“Just being capable of carrying a payload on an ornithopter is already challenging, and this step was demonstrated in a previous publication,” added Dr. Zufferey. “In addition, flapping-flight induces oscillations which increases the uncertainty of the maneuver.”
A difficult undertaking indeed, yet, in a breakthrough for ornithopter flight, the GRIFFIN Project team has successfully tackled this complex engineering challenge.
To achieve their goal, researchers used a novel three-phased method for flight control, consisting of a flapping-flight controller, a close-range correction system, and a passive perching appendage.
Dr. Zufferey and his colleagues then validated their method, successfully flying, landing, and perching a large bird-like drone, entirely autonomously and without additional user input.
Previously, the only flapping-wing drone capable of perching was the “Robobee,” a tiny centimeter-scale insect analog weighing only 100 mg.
The GRIFFIN Project team demonstrated, validated, and replicated autonomous perching using the ornithopter “P-Flap,” short for Perching Flapping-Wing Robot. The bird-like UAV features 100% payload capacity, a nearly five-foot wingspan, and an empty weight of just over 1.5 pounds.
The P-Flap also utilizes a claw-leg system with a double row of carbon-fiber plates that rapidly close onto a narrow perching surface upon contact. Controlling the claw assembly is an actuated robotic leg that can compensate for any flight inaccuracies or disturbances just before landing, ensuring the flapping-wing robot can maintain an erect pose while perching.
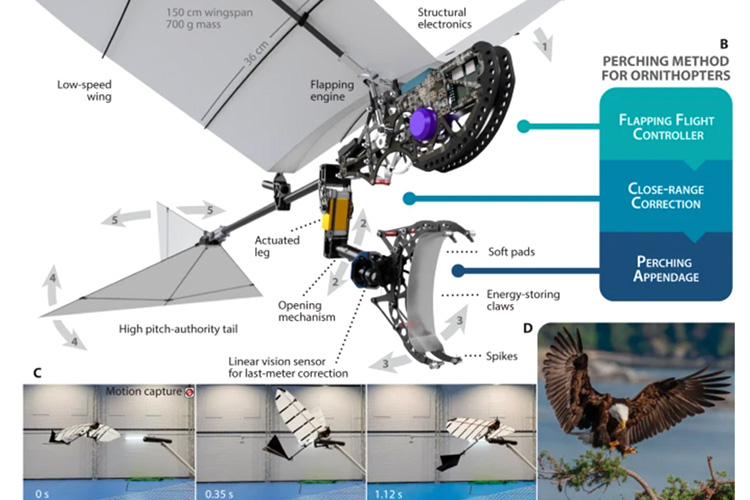
(Image Source: D. Freeman/ The GRIFFIN Project)
“This size represents a good trade-off between manufacturing and testing and scaling constraints, i.e., the robots utilizes commercial components, widely-employed prototyping methods yet is small enough to fly within a motion capture lab space,” wrote researchers.
Using a second bird-like drone, the GRIFFIN Project validated their novel design’s ability to autonomously perch in an indoor motion lab. Ultimately, the achievement marks the first-ever demonstration of a large flapping-wing drone autonomously perching on a narrow surface.
The results of Dr. Zufferey and his colleagues’ experiments were recently published in the prestigious academic journal Nature Communications.