
Roboticists at the Italian Institute of Technology (IIT) have revealed groundbreaking developments in the world of humanoid robotics, showcasing the experimental progress and preliminary validations of the iRonCub, the first jet-powered humanoid robot.
Equipped with four compact jet engines, iRonCub has the unique ability to fly, positioning it as a potential game-changer in advanced mission scenarios, particularly in disaster relief where aerial capabilities in humanoids remain largely unexplored.
The journey began in 2021, with the IIT team encountering significant challenges during testing, such as preventing the robot from catching fire or even exploding due to the engine exhaust. Despite these hurdles, the team has successfully developed prototypes of iRonCub, building on the iCub v2.5 and v3.0 platforms. The iCub, also created by IIT, is a research-grade humanoid robot designed to develop and test embodied AI algorithms.
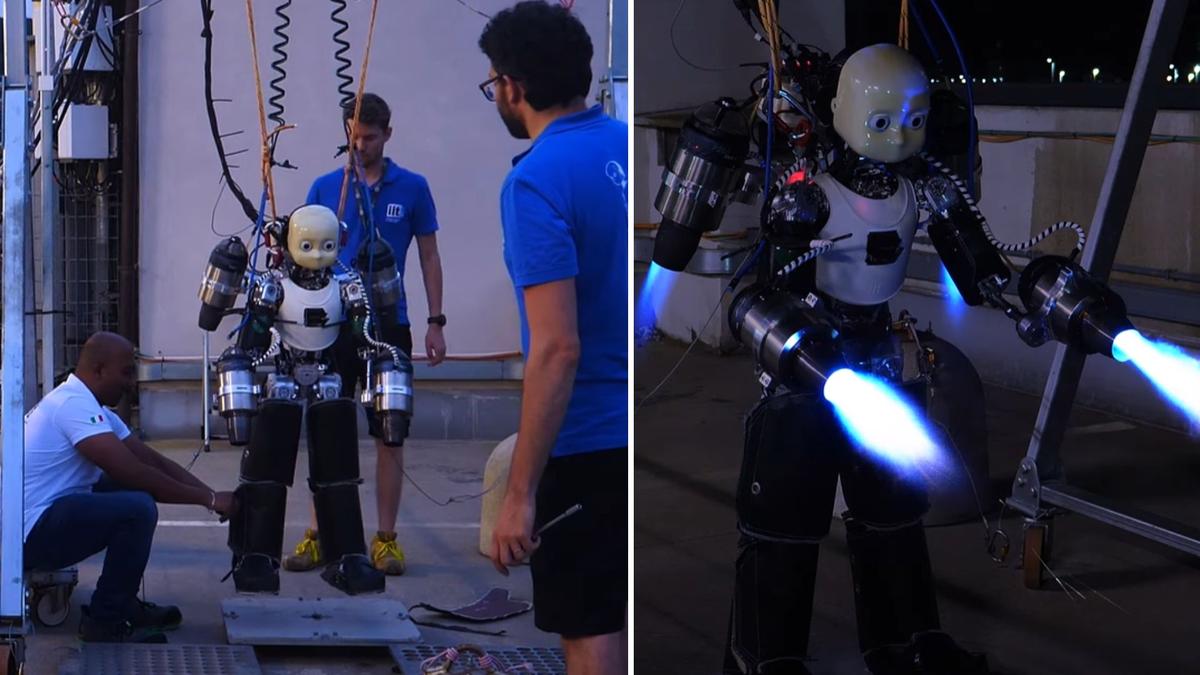
The iCub boasts 53 degrees of freedom, including nine in each hand and most in the upper torso. It is equipped with full-body skin, force/torque sensors, cameras, microphones, gyros, accelerometers, and encoders in each joint. The iRonCub versions have further enhanced these features, integrating four jet engines—two on the arms and two on a jetpack mounted on the back. Current experiments are focused on the iRonCub version 3.
Significant modifications were made to the iCub’s hardware to accommodate these external engines, including a new titanium spine and heat-resistant covers for protection. iRonCub3, equipped with the jet engines, weighs approximately 154 pounds (70 kilograms), with turbines capable of generating a maximum thrust of over 1000N and exhaust temperatures exceeding 600 degrees Celsius. Testing is ongoing in a newly developed flight and control area, marking significant advancements over the previous iRonCub2.
iRonCub3 introduces several upgrades over its predecessor, including the removal of tendons, the integration of force-torque sensors into the jetpacks, new electronics, and next-generation control systems and planners that operate at higher frequencies. According to the researchers, these enhancements significantly boost the robot’s capabilities and performance.
A major challenge in aerial humanoid robotics lies in planning trajectories for both flight and walking, including the transitions between them. To address this, the IIT team developed a momentum-based trajectory planning algorithm in Python using a direct multiple-shooting approach. This planner, validated through simulation, is soon to be tested on the actual robot. For flight control, algorithms manage the robot’s attitude and position using constrained Quadratic Programming optimization. The framework is adaptable to various numbers of jet turbines and ensures compliance with physical constraints.
Thermodynamics plays a crucial role, as turbine exhaust gases can reach temperatures of around 800 degrees Celsius and approach the speed of sound. The aerodynamics of multi-body systems requires neural networks with physics-informed components for real-time evaluation. Controllers must integrate high- and low-bandwidth actuators, including joints and turbines, while planners generate trajectories for both motor dynamics and turbines. The researchers emphasize that experimental validation is critical and hazardous, leaving little room for error.
By Impact Lab