
Object recognition from sensors.
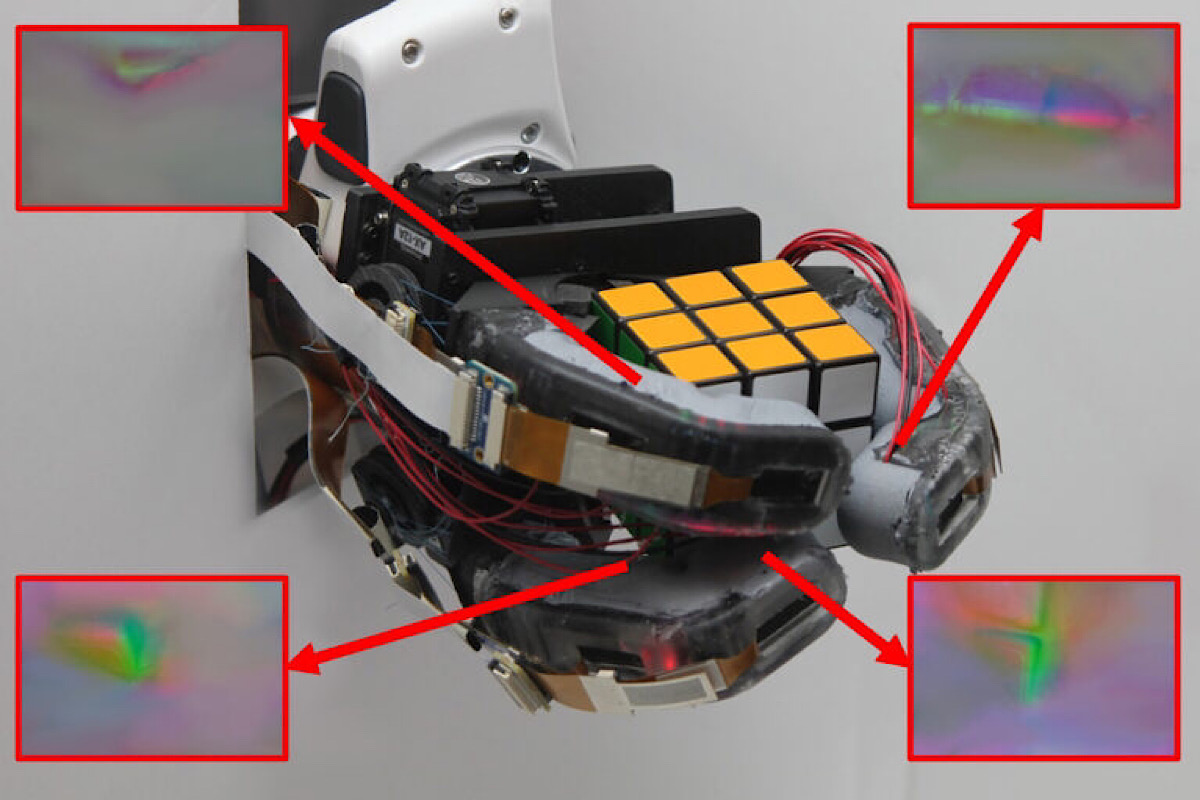
Researchers at the University of California, Los Angeles (UCLA) have developed a 3D-printed robotic hand that can identify objects by grasping them. The hand features a built-in camera that captures images of the object as it is grasped, which are then analyzed using an artificial intelligence (AI) algorithm to identify the object based on its shape, texture, and other features. The hand can also adjust its grip to better hold the object and prevent it from slipping.
Veronica Santos, a professor of mechanical and aerospace engineering at UCLA and one of the researchers involved in the study, explained the potential of the technology: “Our work shows that it is possible to develop robotic hands that can identify and manipulate objects in the real world, without relying on external sensors or pre-programmed knowledge of the objects being grasped.”
The researchers believe that this technology has wide-ranging applications, including the development of more advanced prosthetic limbs and robots that are better able to interact with their environment. It could also be used in manufacturing and logistics, where robots need to be able to identify and manipulate objects.
This new approach represents a significant advancement in the field of robotics, and the potential applications are exciting. The technology is still in its early stages of development, but Santos and her team are optimistic about its future possibilities. As Santos stated, “Our ultimate goal is to create robotic systems that can learn and adapt to the world around them, much like humans do.”
Via The Impactlab